|
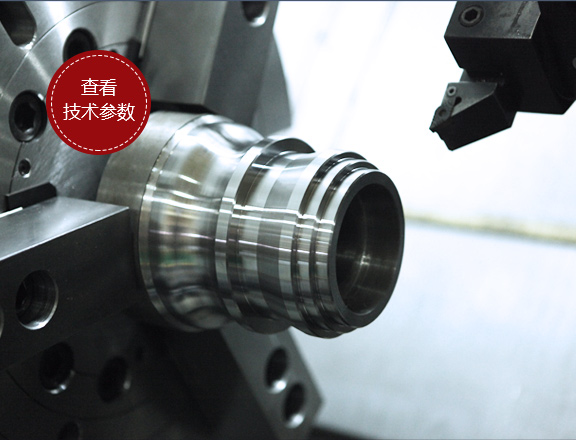
śqך«őż~ŁšäŐńŞÄŠľşżlşš╝ŁšäŐšÜäňî║ňłźňQ?/p>
ŃÇÇŃÇÇż~ŁšäŐňQîšäŐń╗ÂŔúůÚůŹŠłÉŠÉşŠÄąŠłľň»╣ŠÄąŠÄąňĄ┤ňĂłż|«ń║ÄńŞĄŠ╗ÜŔŻ«šöÁ(shĘ┤)Š×üń╣őÚŚ▀_╝îŠ╗ÜŔŻ«šöë|×üňŐáňÄőšäŐńÜg˛qÂŔŁ{ňŐĘ´╝îśqך«őŠłľŠľşżlşÚÇüšöÁ(shĘ┤)ňQîň┼׊łÉńŞÇŠŁíŔ┐׿lşšäŐż~ŁšÜäšö?shĘ┤)Úś╗šäŐ´╝îňůÂň«×ż~ŁšäŐŠś»šé╣šäŐšÜäńŞÇ┐UŹŠ╝öňĆśŃÇéňŻôšé╣ŔĚŁňçĆň░ĆňQîńő╔šćöŠáŞšŤŠÇ║ĺÚçŹňĆáň║ŽŔÂůśqçŔ׏ŠáŞšŤ┤ňżäšÜä1/3ń╗ąńŞŐŠŚË×╝îňłÖňĆ»ňżŚňł░ňůńhťëńŞÇň«Üň╝║ň║ŽšÜäŠ░öň»ćŠÇžšäŐż~ŁŃÇéŠá╣ŠŹ«ÚÇÜšöÁ(shĘ┤)Šľ╣ň╝ĆšÜäńŞŹňÉî´╝îňĆ»ň░ćż~ŁšäŐňłćńěôń║îšžŹňQ?/p>
ŃÇÇŃÇÇ1ŃÇüŔ┐׿lşš╝ŁšäŐ´╝îŠíÂŔÝnňťĘńŞĄšäŐŔŻ«ÚŚ┤Ŕ┐׿lşšž╗ňŐĘ´╝îšäŐŠÄąšöë|Áüń╣čŔ┐׿lşÚÇÜŔ┐çňQĆňŹŐńެňĹĘŠçLňŻóŠłÉńŞÇńެšäŐšéĆVÇéŠëÇń╗ą´╝îśqÖšžŹšäŐŠÄąŠľ╣ň╝ĆÚÇčň║ŽŔżâň┐źňQîŔâŻŔżĹÍł░10-12m/minŃÇéňÄ芣ąšČČń║îń╗úňĺîšÄ░ňťĘšÜäňŹŐŔç¬ňŐĘňůŹšé╣šäŐŠť║ň░▒ÚççšöĘśqÖšžŹšäŐŠÄąŠľ╣ň╝ĆňQîň«âňşśňťĘšÜäÚŚ«Ú󜊜»šäŐŔŻ«ŠśôňĆĹšâşŔÇîšúĘŠŹč´╝îŔ׏ŠáŞÚÖäŔ┐ĹňĆŐŠíÂÝwźŔíĘÚŁóŠśôśqçšâşšöÜŔç│šâžń╝ĄŃÇ?/p>
ŃÇÇŃÇÇ2ŃÇüŠľşżlşš╝ŁšäŐ´╝îŠíÂŔÝnňťĘńŞĄšäŐŔŻ«ÚŚ┤Ŕ┐׿lşšž╗ňŐĘ´╝îŔÇîšäŐŠÄąšöÁ(shĘ┤)ő╣üŠľşżlşŠÄąÚÇÜ´╝îŔÇĆÚÇÜŠľşńŞÇőĂí´╝îňŻóŠłÉńŞÇńެšäŐšéĆVÇéňÄ芣ąŔÇüšäŐŠť║ň░▒ÚççšöĘśqÖšžŹšäŐŠÄąŠľ╣ň╝ĆňQîň«âŔÖŻšäÂŔâŻňůőŠťŹŔ┐׿lşš╝ŁšäŐŠŚÂšÜäńŞÇÚâĘńćżż~║šé╣ňQîńŻćÚÇčň║ŽŠůóŔÇîšÄ░ňťĘňłÂŠíÂŔíîńŞÜňżł×«ĹÚççšöĘŃÇ?/p>
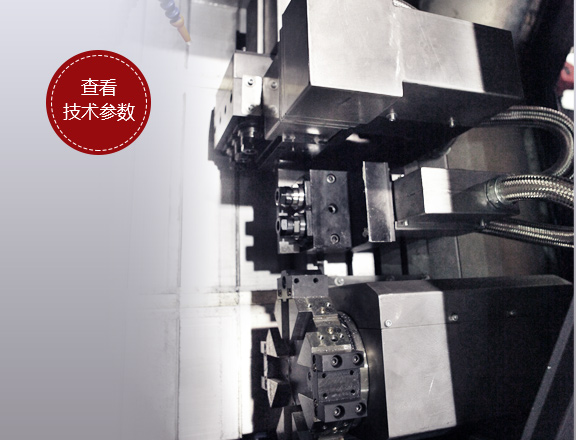
żlôŠ×äňQ?/p>
ńŞ╗Ŕßušź»ÚâĘŔúůšŻ«ŠťëšäŐŠÄąňĄ╣ňůńhłľńŞëšł¬ňŹíšŤśňQîšöĘń║ÄŔúůňĄ╣ň«ÜńŻŹňĚąń╗Ë×╝Ť×«ĹÍ˝öňĆ»ÚççšöĘŠ░öňŐĘŠłľŠëőňŐĘÖňš┤žŠľ╣ň╝ĆňQîšź»ÚâĘňĆ»ńżŁŠŹ«ňĚąńÜgŠľ╣ň╝ĆšÜäńŞŹňÉîÚÇëšöĘńŞŹňÉîšÜäšäŐŔúůňĄ╣ňůńhłľőzŇdŐĘÖňÂň░ľňQŤň░żň║žňĆ»ňťĘň║ŐÝwźň»╝ŔŻĘńŞŐŠ╗ĹňŐĘňQîňĆ»Ŕ░⊼┤Šť║ňĄ┤׫ĹÍ˝öšÜäÚŚ┤ÚÜöń╗ąÖň║ň║öńŞŹňÉîÚĽ┐ň║ŽšÜäňĚąń╗Ë×╝ŤšäՊ׬Šť║Š×äňĆ»ńżŁŠŹ«ňĚąń╗šäŐŠÄąńŻŹż|«šÜäńŞŹňÉîňQîŠ▓┐ň»ĂDŻĘŠľ╣ňÉĹŠî¬ňŐĘňł░šŤŞň║öńŻŹż|«ŃÇ?/p>
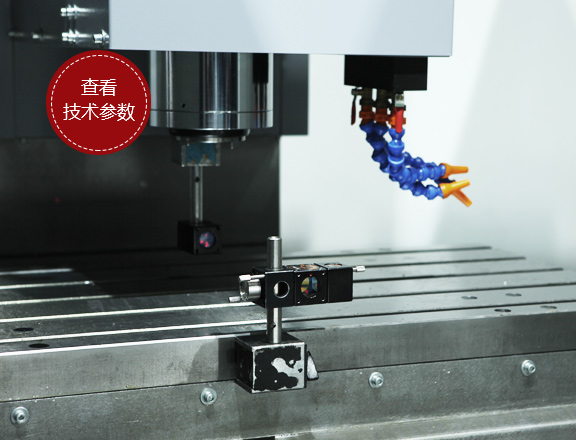
šäՊ׬ňŤ×ŔŁ{Šť║ňĄ┤ÚççšöĘšŤ┤ŠÁüňçĆÚÇčšöÁ(shĘ┤)Šť║Úę▒ňŐĘ´╝îňůÂňŤ×ŔŻČÚÇčň║Žň«îŠłÉŠŚáŠ×üŔ░âÚÇč´╝îšäŐŠÄąŠÉşŠÄąÚçĆš╗Ćśq犼░šáüÚóäňůłŔ«żż|«ŃÇ銼░ŠÄžŠť║Š×äńěôňŹĽŔßuŠłľňĄÜŔŻ┤ŠĽ░ŠÄž´╝îÚççšöĘŠşąŔ┐Ťšöë|ť║Šłľń║Ąő╣üń╝║ŠťŹšöÁ(shĘ┤)Šť║Úę▒ňŐĘ´╝îšäՊ׬ňüܚĻż~ŁšäŐŠÄąŠŚÂŠĽ░ŠÄžŠť║Š×äÚę▒ňŐĘšäՊ׬ňüÜńŞŐńŞőňüÜń╗┐ň┼לqÉňŐĘŃÇéšäŐŠÄąňĄ╣ňůĚń┐ŁŔ»üňĚąń╗šÜäŔŻ┤ňÉĹňĺîňżäňÉĹň«ÜńŻŹ´╝îżlĆŔ┐çŔ░⊼┤šäŐŠÄąňĄ╣ňůĚšÜäň«ÜńŻŹšé╣ňĺîŠö╣ŠŹóň«Üň┐âŔßuňQîŔâŻňĄčň«îŠłÉńŞŹňÉîŔ×║Š»ŹňĚąń╗šÜäŔç¬ňŐĘšäŐŠÄąŃÇ?/p>
--Š▓łÚś│ňĘüňůőňłŤŠľ░šäŐŠÄąŔ«Ĺͥ犝ëÚÖÉňůČňĆŞ
|